My experience with rust+wasm
Over the past few days, I’ve been working on a SPH fluid simulator with rust, compiled to wasm. The goal here is more “real-time & pretty-looking” than “offline and accurate”. sandspiel was a great motivator to start working on this.
Update: You can check out the demo here, or the source code here
I like the way cargo and rust handle having different targets. rustup target list lets you see a list of targets that rust can compile to, and cargo build --target lets you build your rust codebase into a specific target. wasm-pack pretty much handles all the details however, making it a breeze to get started. I used the Rust and WebAssembly tutorial to get started, and this covered a lot of the bases.
While I had used rust a bit in 2018, I never worked on a substantial project with it. My memory of the language is quite faint, and I had to keep referring to The Rust Programming Language book. I still haven’t dealt with smart pointers and the like. My point: I am new to rust. Its also worth noting that the rust+wasm ecosystem is quite new, and should get much better over time.
I’ll write about the fluid simulation in a later post. This post documents my experiences with the language, rust. (I might revisit this a few weeks later and find some things silly. Such is learning.)
Here are my observations, in no particular order:
Helpful error messages
The compiler gives quite nice error messages:
error[E0425]: cannot find value `width` in this scope
--> src/universe.rs:38:31
|
38 | let accel = Grid::new(width, self.height, H, &self.particles);
| ^^^^^ help: try: `self.width`
That was a clean error message with a very specific possible fix. Here’s another:
error[E0282]: type annotations needed
--> src/universe.rs:143:13
|
143 | let ddv = 2.0 * izip!(&neighbours, &x_ijs, &dWs).map(|(pj, x_ij, dW)| {
| ^^^
| |
| cannot infer type
| consider giving `ddv` a type
There were a lot better examples but I cannot recall how to reproduce them.
Crates and wasm compatibility
Targeting wasm has its ups and downs. I understand that it is still in early development; and most of the warts will get sorted out over time. For one, I found it quite odd to have to use the js_sys crate to sample random numbers(according to rust-wasm book). This made it extremely difficult to debug my non-wasm target. Eventually I found out that the rand package works on both wasm and non-wasm, and have been using that since. Another dependency didn’t have wasm support, but I could get around this with feature gating in Cargo.toml:
[target.'cfg(not(target_arch="wasm32"))'.dependencies]
kiss3d = "0.20.1"
nalgebra = "0.18.0"
Note: While kiss3d claims to support wasm, I want more control over the WebGL rendering. I’m using kiss3d just to debug my code without going through the browser every time.
Debugging
A super-simple way to step through my code would be nice. It seems possible, but a more out-of-the-box solution like QtCreator or pycharm provide would be a great addition to the rust ecosystem. IntelliJ Rust doesn’t support debugging (yet?). Debugging the wasm code seems more difficult, but thankfully I have been able to test everything on a Linux binary directly before generating wasm code. println! debugging can only get you so far. Step-by-step debugging is a great way to understand the control flow of an existing code base.
The rust plugin for Visual Studio Code handles auto-complete well. The only problem is the Rust Language Server seems to compile everything again, bloating the required hard disk space.
Nice community
The people on the discord channel and r/rust are very nice and helpful. This creates a conducive environment for learning and making progress.
Generics are not intuitive
A lot about getting traits to work right feel like black magic in rust. For instance, its not possible to simply add a “trait object” to a struct, like:
trait Accelerator {
// ...
}
struct Universe {
accel: Accelerator, // This does not work
}
The reasoning behind this is explained in the advanced types section of the book, but simple OOP patterns shouldn’t require this much friction to implement. The error messages talk about dyn and the Sized marker; and while I shall eventually dig into this, it seems excessive at this point. I ended up using a Box type to store the “trait object”, which works but requires a dereference every time I want to call a function of the trait.
Also, wasm_bindgen does not yet support lifetimes and traits for struct definitions.
Noisy warnings
This is one of those things I’ll curse when I have to deal with, but its for the best. Warnings about unused functions help catch bugs and prune old code.
Long compile times & lot of disk space used
(title) But it is much faster once cached.
Benchmarking tools
This is once area in which rust truly shines! By following this and this, it was quite straightforward to generate a flamegraph1:
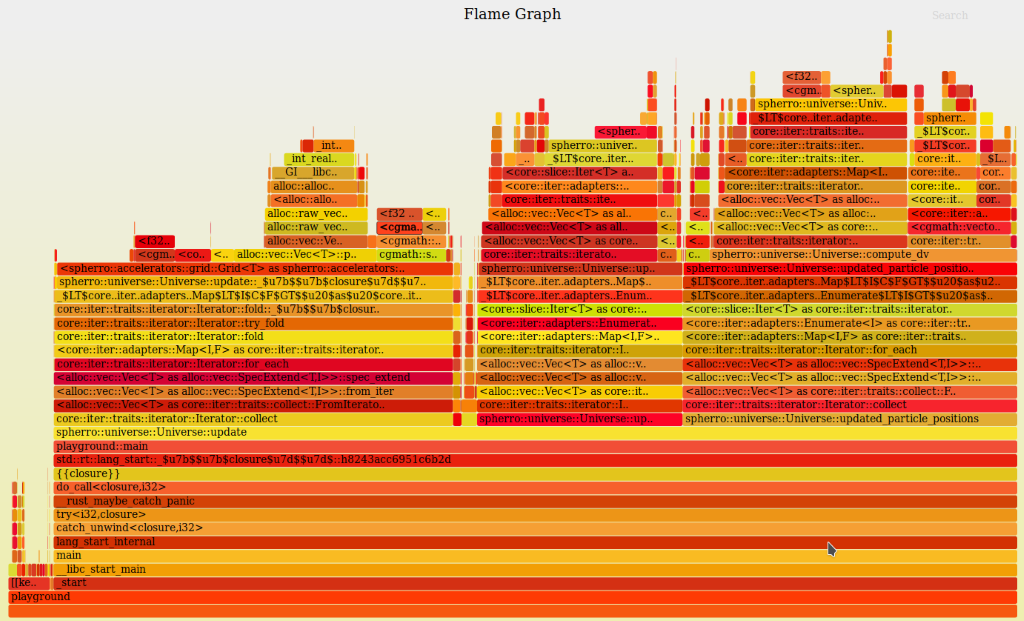
SO MUCH INFORMATION
This helped me pin down some bottlenecks, such as the Vec spending too much time reallocating memory, which I avoided with a Vec::with_capacity.
Flamegraphs aren’t very useful without solid benchmarks however, and that’s where criterion fits in! This is a fantastic library that lets you perform statistical analysis of performance improvements/regressions. criterion gives you confirmation that your change is in fact increasing(or decreasing) the performance of your program. Here is a sample output from criterion:
solver_step 0.001 time: [3.2821 ms 3.3249 ms 3.3661 ms]
change: [-52.895% -51.747% -50.570%] (p = 0.00 < 0.05)
Performance has improved.
Found 3 outliers among 100 measurements (3.00%)
3 (3.00%) high mild
Now I KNOW that my change had a positive influence on my runtime! criterion also leverages gnuplot to generate reports:
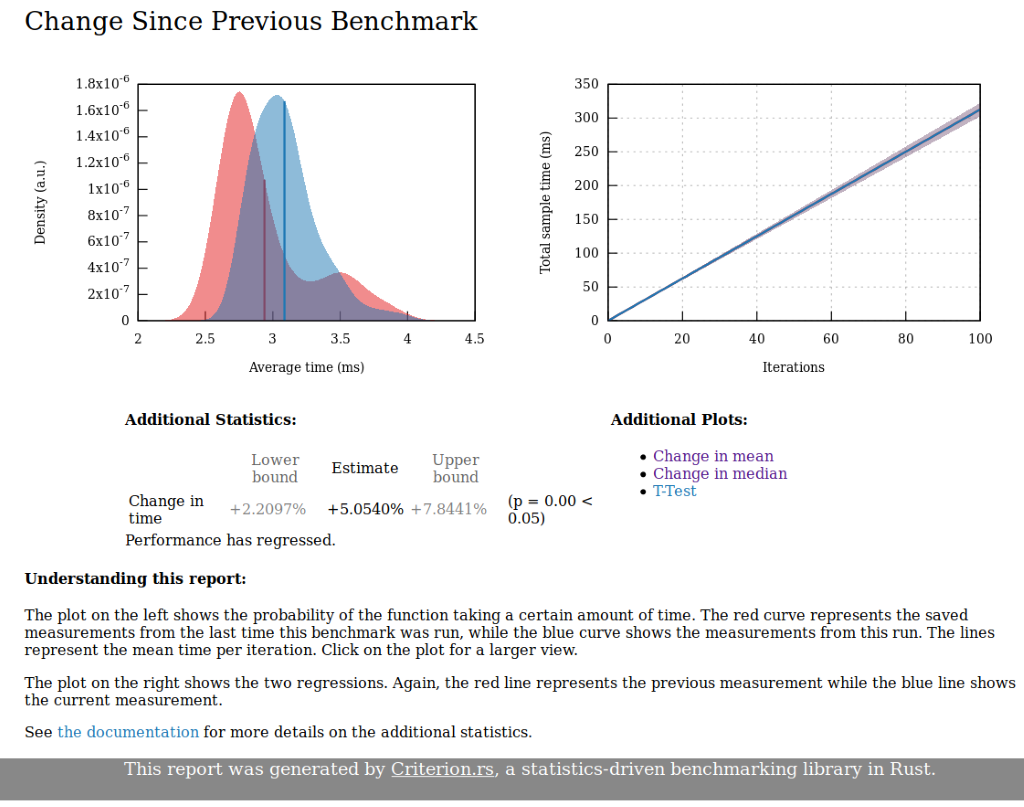
Its super important to measure performance and identify bottlenecks in performance-critical code, and tools like criterion and flamegraphs help.
Multi-threading with rayon
While multi-threading for wasm isn’t ready yet, I still wanted to play around with rayon for regular binary targets. This is what the docs had to say:
First, you will need to add
rayonto yourCargo.tomland putextern crate rayonin your main file(lib.rs, main.rs).Next, to use parallel iterators or the other high-level methods, you need to import several traits. Those traits are bundled into the module
rayon::prelude. It is recommended that you import all of these traits at once by addinguse rayon::prelude::*at the top of each module that uses Rayon methods.These traits give you access to the
par_itermethod which provides parallel implementations of many iterative functions such asmap, for_each, filter, fold,and more.
I followed those steps, and replaced iters in my hot loops with par_iters. In addition, I had to add the Sync marker to one of my struct’s members. And then it just worked! Easy 2x performance improvement. It works well here because there are no mutable data dependencies between the threads: I didn’t spend any time fighting the type system. YMMV.
emu is also on my radar, if I ever want to run it on the GPU.
Need to learn too much of the language
There are way too many rust concepts that need to be learnt before you can build a usable program. While the borrow checker, lifetimes, rust’s smart pointers, etc may be simple to someone experienced, they induce a lot of friction for a beginner working on a first program.
Syntax can get ugly
Look at the amount of redundancy here:
impl<'a, T> Accelerator for Quadtree<'a, T> where T: HasPosition {
fn nearest_neighbours(&self, i: usize, r: f32) -> Vec<usize> {
// ...
}
}
impl<'a, T> Quadtree<'a, T> where T: HasPosition {
pub fn new(width: f32, height: f32, items: &'a [T]) -> Self {
// ...
}
}
Additionally, when lifetimes and traits accumulate, the syntax can get quite reminiscent of C++.
Maintaining separate builds is easy
I used the kiss3d library to create a debug visualizer. It was quite simple to get cargo to generate only the wasm library, or only a Linux binary. This workflow makes it easy to debug work in progress. This might change as I diverge the features between the two builds, obviously.
Nitpicks
- It seems quite messy to have to define the operator for an object as well as a reference to the object. Initially I wanted to implement my own Vector class, but warts like these made me decide to use the fantastic cgmath library instead.
clampfor floats is still a pending RFC. Its nice that the community discusses these changes extensively, but some working version of clamp with its behaviour documented would’ve been nicer.
Conclusion
Using rust is mostly pleasant. I’ll have more to write about once the renderer is built. Additionally, it seems prudent that I understand more about the borrow checker and the means offered by Box, Rc, and family to work with it.
-
Use
perf record --call-graph dwarfand pipe the output ofstackcollapse-perftorust-unmangleto get better flamegraphs. ↩︎